- f2fs是一款常见的针对NAND介质优化的可读写文件系统
论文题目: F2FS: A New File System for Flash Storage
背景介绍以及f2fs概览
常见的flash设备在写入数据时需要先把数据进行擦除。NAND架构的flash设备由于使用了存储控制器,更支持随机读写操作,因此在很多手机的真实负载场景下有着很好的表现。
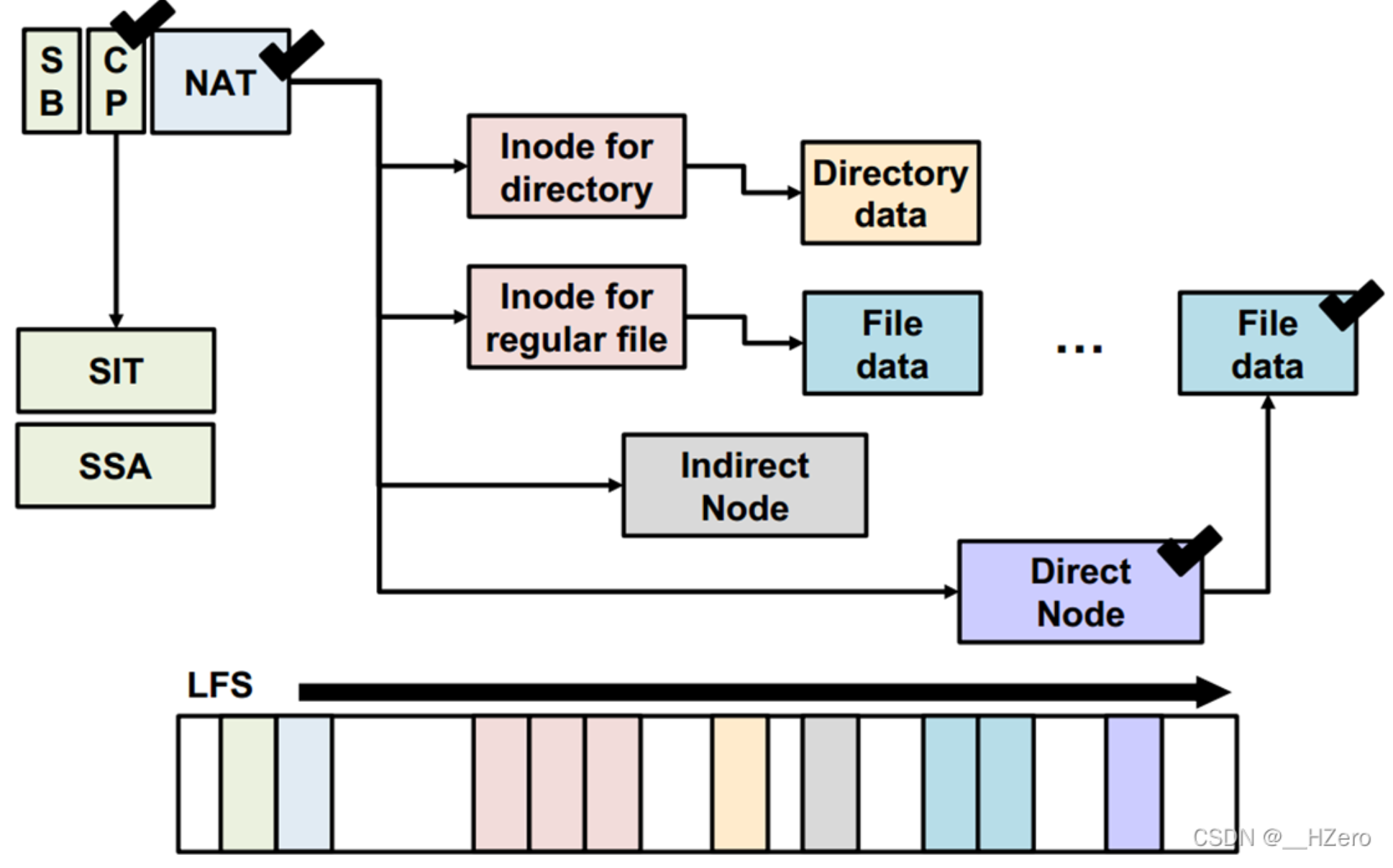
f2fs主要把存储空间分成了六个部分:
- superblock部分(SB):保存了文件系统的基本分区信息以及一些初始化变量(后续不可修改)
- checkpoint部分(CP):保存了文件系统状态,bitmap,inode表以及当前处于活动状态的分段入口表。
- 段信息表部分(SIT):包含了有效块的数量和数据区域中所有块的位图。
- 节点地址表部分(NAT):包含了一个块地址表来定位节点块在存储区域的位置。
- 段汇总区域部分(SSA):包含了表示主区域中所有块的所有者信息的摘要条目,例如父节点编号SSA条目会在清理期间迁移有效块之前标识父节点块。
作者专门通过一个例子向我们揭示了f2fs的工作原理:当我们需要访问/dir/file路径下的文件,需要分为下面几步:(1)通过读取NAT获取根节点的inode编号以及对应的数据块位置(2)在进入root数据块后,会查询到一个名为dir的文件目录并且获取其inode号(3)会把获取到的inode号输入进NAT中进行查询到一个新的物理块号(4)读取dir文件目录对应的物理块(5)在dir文件块中寻找file的inode号,之后重复3,4中的步骤直到寻找到对应的文件所在的数据块。真实的数据可以从main area中通过文件索引获取。
- 文件结构
原始的LFS文件系统通过一个inode map实现把inode号转换成一个磁盘上的位置。这会导致wandering tree效应,因为LFS的脏数据是追加更新的,所以如果一个数据块变脏了,那么那个数据块的直接索引块(必须要更新,但是是在log尾部进行追加更新)、间接索引块(由于直接索引块被更新,会发生递归的对间接索引块进行追加更新)最终导致递归更新,这也就是我们说的wandering tree效应。
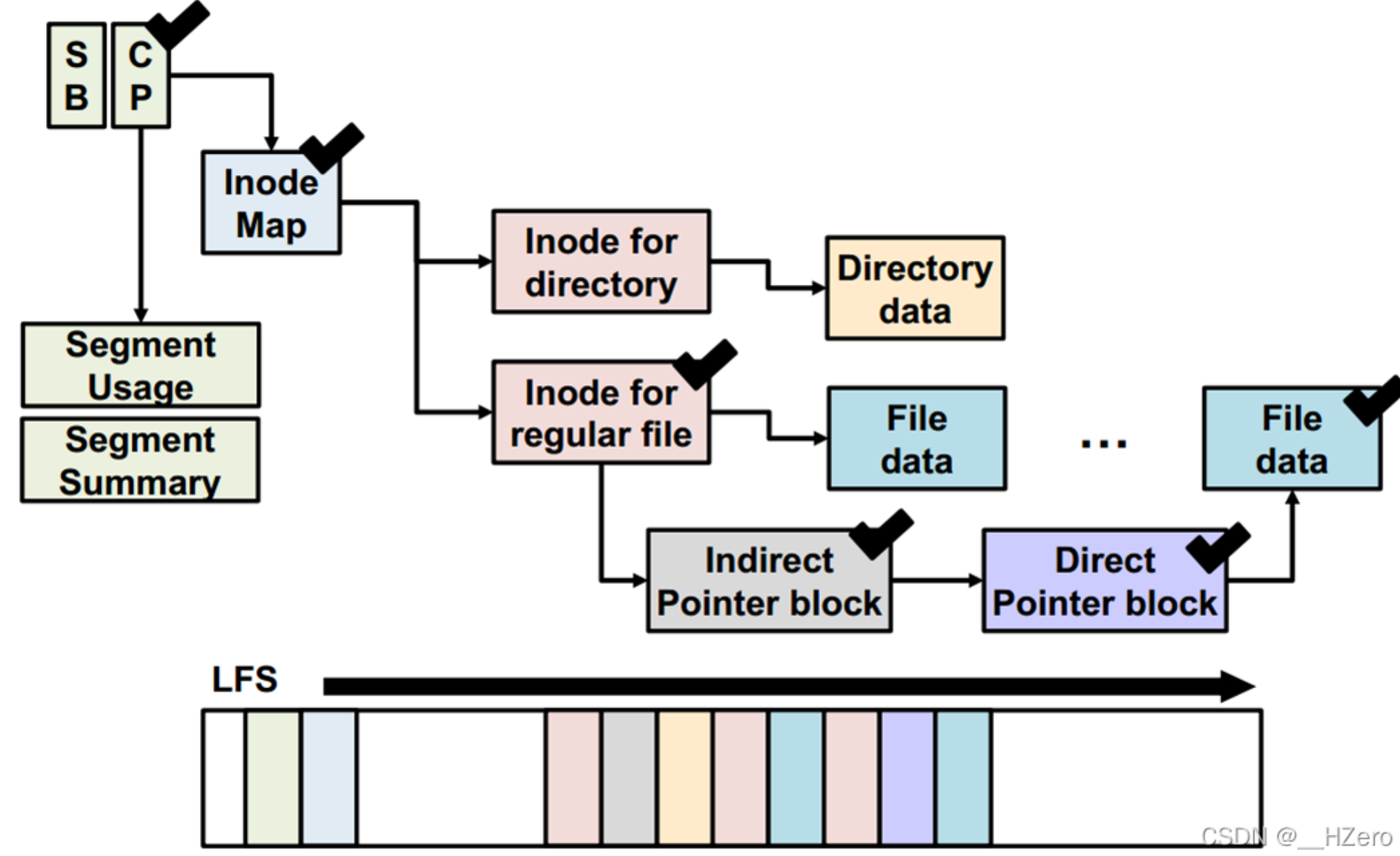
LFS的inode map仅仅只是单纯的保存每个node的inode号以及对应的物理块号,间接索引的访问需要先访问上一级索引的数据块,但是f2fs通过NAT表,间接索引指向的并不是下层数据的数据块地址,而仅仅是NAT表中的一个数据条目,这样就不会发生上述wandering tree问题。在f2fs中只会发生一次数据块的修改以及对应的NAT表项的修改,上层的间接索引指向的仍旧是相同表项。
- 文件目录结构
在f2fs中,一个4KB大小的文件目录项是由一个bitmap以及两个数组(里面包含了插槽以及文件名称的数据对)组成的。每一个插槽都拥有一个哈希值、inode号、文件名长度以及文件类型(普通文件,文件目录,标志链接)这几个信息。每一个文件目录都建立了多层级的哈希表来管理大量的数据条目。当f2fs需要在一个文件目录中查找一个文件名。首先会从第0层遍历整个哈希表,在每一层的遍历过程中,都会扫描包含有2个或者4个数据块的桶,需要O(log(数据块数目))的时间复杂度。
- 多起点的日志区域
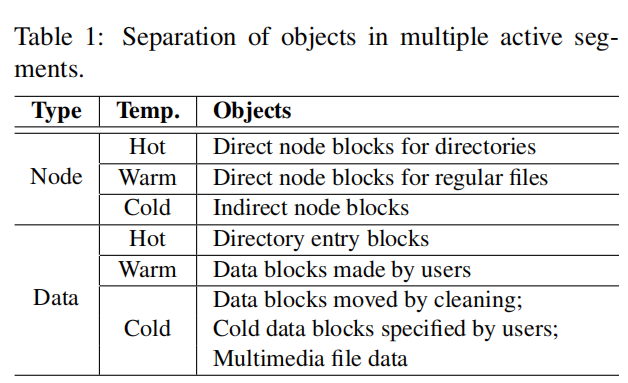
不同于LFS文件系统只有一个很大的日志区域,f2fs保持了六个主日志区域来最大程度上进行了冷热数据分离。f2fs针对节点以及数据块定义了三种程度的数据热度:hot,warm以及cold。
f2fs会把直接的节点块当作更热的数据块(会更新的更加频繁,这个因为直接节点会直接指向文件数据块,因此任何对文件数据的修改操作都会有可能对直接节点产生影响。间接node会指向NAT表中的下一级节点,间接节点只会在某个node发生了删除或者添加后才会被修改),此外针对文件目录的节点块以及对应的节点数据块都被当作是hot的(主要是因为相比于常见的文件数据有着不同的写入流程)。
对于常见的数据块,如果一旦满足以下三条标准之一就会被当作cold数据:
- 被cleaning机制回收的数据块
- 被用户标记为cold的数据块
- 那些被标记为只进行一次写入或者只读的数据块,f2fs可以通过文件的扩展名去识别这些数据
f2fs默认是使用了6个日志来处理写入操作(EXT4仅仅使用了一个线程),这样就能够保证多个写入操作能够同时进行。如果开启了6个日志进行写入操作,那么这六个分别对应了表一中的六种情况。如果只开启了4个日志,那么会把cold以及warm进行合并处理,如果只开启了两个日志,那么只会发生一个日志处理data,另外一个处理节点的写入。
f2fs同时设计了一个configure区域用来和FTL层进行兼容,从而减小垃圾回收的开销。常见的FTL层在数据块以及flash日志块有三种方式(全相联,组相联,块相连)。全相联代表了一个flash日志块用来存储所有数据块的日志,组相联代表了一个flash日志块用来存储一组连续数据的日志,块相连代表了一个flash日志块用来存储单个数据的日志信息。(和组原里面的类似)。常见的FTL层使用了全相联或者是组相联的方法来更好的处理随机写操作。f2fs通过把活动的日志分别映射到不同的区域从而在FTL层就能够避免在并行写入操作时发生对一个块的冲突访问(主要是在全相联以及组相联的情况下,因为会有多个数据块对应一个日志块的情况)。
- cleaning回收机制
cleaning机制主要是保证了f2fs的垃圾回收管理。f2fs的cleaning的操作是以section为粒度进行的。f2fs的cleaning分为两个独立的操作过程:foreground和background。foreground操作只会在空余section不足的时候才会被触发,在系统内核中会创建一个线程,周期性的在后台执行cleaning操作,一个cleaning操作会被分成三个部分:
- 驱逐section选择:首先要选择一个section作为cleaning对象,常见的有两种选择算法,一种是greedy另一种是cost-benefit。贪心算法直接会选择一个拥有最少有效块的section作为驱逐对象。f2fs在foreground选择了这种方式来保证在应用视角获取最少的延迟。此外,f2fs预留了5%的存储空间来保证cleaning过程中较高的空间利用率。cost-benefit准则被background所采用,这个选择准则不仅仅是根据一个section的空间有效率,还根据一个section的使用时间长度来决定,通过对一个section中每一个segment的平均使用长度取平均值来反映一个section的使用时间长度,这也能够帮助f2fs进一步进行冷热数据分类。
- 有效块的识别以及迁移:当完成了驱逐块的选择过程后,f2fs需要快速识别出一个section中的有效数据块。这个过程通过SIT(segment information table)中的位图进行识别。一旦完成了识别过程,f2fs就会把有效的数据块迁移到其他的空闲日志中去。对于后台的cleaning操作,f2fs并不会产生实际的IO流进行数据块迁移。f2fs通过把数据块加载到页缓存中并把其标记为dirty。之后f2fs会等着内核的工作线程之后把这些脏数据刷回存储设备中即可。
- 当所有的有效数据块被迁移了之后,该section就会被标记为空闲空间。在检查点被建立之前,这个section还不能够被分配,这是因为一旦发生崩溃,无法通过上一检查点来恢复数据。
- 动态日志机制
原本的日志文件系统使用了两种日志模式:普通日志模式和线程日志模式。在普通日志模式下,通过写入块数据来对segment进行清理并且严格遵循顺序写原则。即使用户提交了很多个随机写请求,这个过程会把这些请求转换成顺序写。一旦没有足够的空间,这种方式就会产生大量的cleaning操作开销。线程日志模式会向已有的segment中的invalid block中写入数据,但是这种随机写的操作会在一定程度上影响性能。f2fs同时使用了这两种模式,并且会根据文件系统的状态进行动态切换。具体来说,如果当前的文件系统中有k个空闲的section,那么就会优先使用普通日志模式,否则就会切换到线程日志模式。(值得注意的是闪存设备对于线程日志模式的随机写操作很适合,有着极高的性能表现)
- 检查点机制以及恢复机制
检查点机制主要分为以下几个步骤:
- 所有的脏节点以及dentry节点都会被从页缓存中flush到底层存储设备中。
- 停止所有常见的操作如:create、unlink等等
- 所有的文件系统元数据都会被写入到专用的磁盘区域中
- f2fs会创建一个检查点,具体包括了:
- header和footer,会在创建检查点的同时设置对应的版本号。
- NAT和SIT的位图信息
- NAT和SIT的日志
- 孤儿数据块(笑),如果发生了一个inode在被关闭之前就被删除了(两个进程打开了同一个文件,但是只有一个进程删除了该文件),该inode节点就会被标记为孤儿节点。
- 前滚恢复机制
f2fs使用了一个向前滚机制来进行普通文件数据恢复。前滚恢复则在后滚恢复的基础上进行优化,在写入普通文件时,很多时候只需要对特定文件进行一致性操作,而系统中的其他数据则不关注,如果每次都写入一次Checkpoint,未免太过耗时。所以在写入普通文件时,只需要确保该文件的管理数据落盘即可,并通过特殊的标记,记录其状态,在恢复流程中,根据写入的数据可以恢复到掉电前的状态。
实验部分
使用qemu配合gdb完成对f2fs的调试
- 首先下载linux内核源码以及busybox源码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57下载内核
wget https://mirrors.edge.kernel.org/pub/linux/kernel/v5.x/linux-5.10.163.tar.gz
下载busybox
git clone https://github.com/mirror/busybox.git
编译busybox
export ARCH=arm
export CROSS_COMPILE=arm-linux-gnuabi-
make menuconfig
修改设置
Busybox Settings --->
Build Options --->
[*] Build BusyBox as a static binary (no shared libs)
完成编译
make install
把busybox中生成的_install目录拷贝到linux解压后的目录中
sudo mkdir etc
sudo mkdir dev
sudo mkdir mnt
sudo mkdir –p etc/init.d/
在_install /etc/init.d/目录下创建rcS文件,写入如下内容
!/bin/sh
mkdir –p /proc
mkdir –p /tmp
mkdir -p /sys
mkdir –p /mnt
/bin/mount -a
mkdir -p /dev/pts
mount -t devpts devpts /dev/pts
echo /sbin/mdev > /proc/sys/kernel/hotplug
mdev –s
给rcS最高权限
sudo chmod 777 rcS
在 _install的etc目录下创建fstab文件并写入如下内容
proc /proc proc defaults 0 0
tmpfs /tmp tmpfs defaults 0 0
sysfs /sys sysfs defaults 0 0
tmpfs /dev tmpfs defaults 0 0
debugfs /sys/kernel/debug debugfs defaults 0 0
在_install /etc目录下创建inittab文件并写入如下内容:
::sysinit:/etc/init.d/rcS
::respawn:-/bin/sh
::askfirst:-/bin/sh
::ctrlaltdel:/bin/umount -a -r
在_install dev目录下创建设备节点
sudo mknod console c 5 1
sudo mknod null c 1 3
首先是进入linux源码目录,然后通过menuconfig配置qemu运行参数:
1 | export ARCH=arm |
进入menuconfig界面以后,修改几个内核选项:
第一个是修改initramfs的位置,即_install目录,这样系统就会将_install目录作为启动的根目录,还需要把boot option的command string清空。
1 | General setup ---> |
第二个选项是内存选项,配置 memory split 为“3G/1G user/kernel split”以及打开高端内存。
1 | Kernel Features ---> |
然后就可以开始编译内核:
1 | make bzImage –j4 ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- |
- F2FS工具的准备
主要使用到用于格式化的mkfs.f2fs工具,ubuntu下可以执行以下命令进行安装1
sudo apt-get install f2fs-tools
- 编译可运行F2FS的内核
经过上述步骤的编译,会在Linux的根目录生成一个.config文件,打开这个文件,找到以下的内核选项,并设置为y。记得要打开gdb调试的内核编译选项以及把编译优化参数设置为Os否则会有很多变量被优化掉1
2
3
4
5
6
7
8
9
10
11
12
13CONFIG_F2FS_FS=y
CONFIG_F2FS_STAT_FS=y
CONFIG_F2FS_FS_XATTR=y
CONFIG_F2FS_FS_POSIX_ACL=y
# gdb调试信息
CONFIG_GDB_SCRIPTS=y
# debug信息
CONFIG_DEBUG_INFO=y
# 要先把performance那个选项关了再开这个保证Os编译优化
CONFIG_CC_OPTIMIZE_FOR_SIZE=y
然后重新编译编译结束后,创建一个文件作为F2FS的磁盘空间1
2make bzImage –j4 ARCH=arm CROSS_COMPILE=arm-linux-gnueabi-
make dtbs1
2dd if=/dev/zero of=a9rootfs.f2fs bs=1M count=250 # 创建250MB的F2FS空间
mkfs.f2fs a9rootfs.f2fs #使用F2FS格式化工具进行格式化
接下来,通过执行如下命令启动Qemu虚拟机,需要使用-sd选项将刚刚创建的作为F2FS磁盘空间的文件挂载到系统中:
1 | qemu-system-arm \ |
最后,Qemu完成启动之后,在Qemu的linux系统执行如下命令将F2FS挂载到linux中:
1 | mount -t f2fs /dev/mmcblk0 /mnt/ -o loop |
最终使用vscode打开该项目,创建.vscode目录并设置launch.json文件
1 |
|
之后就可以在vscode中打断点查看调试信息了。